Tối ưu hóa năng lượng tiêu thụ cánh tay máy bằng cách thiết kế bổ sung cơ cấu cân bằng đối trọng
07/04/2015
KH&CN trong nước
KH&CN trong nước
Nhóm tác giả Trần Ngọc Đảm, Nguyễn Thị Thu Hiền (ĐH Sư phạm Kỹ thuật TP.HCM) tìm cách tối ưu hóa năng lượng tiêu thụ của robot. Giải pháp đưa ra là thêm vào hệ thống cân bằng đối trọng là một lò xo nối giữa trục quay và tay robot.
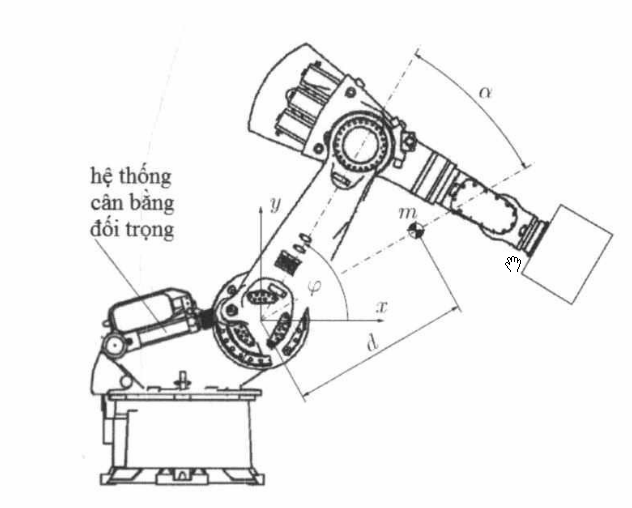
Chuyển động của tay robot là chuyển động xoay của một vật rắn quanh một điểm cố định, được mô tả bằng góc giữa trục hoành và tay robot. Khi tay robot di chuyển xuống, lò xo bù một phần khối lượng của robot và do đó giảm bớt tải đặt trên động cơ.
Nhóm tác giả đã sử dụng mô hình toán và hàm tiêu thụ năng lượng. Các tham số của lò xo và điểm kết nối giữa lò xo và tay robot được tối ưu hóa bằng phương pháp tối ưu hóa toán học. Sau đó, mô hình thật tay robot với cơ cấu cân bằng đối trọng được xây dựng để kiểm tra. Kết quả cho thấy, tổng năng lượng tiêu thụ của tay robot phụ thuộc rất lớn vào chiều dài và vị trí điểm lò xo. Với giải pháp tối ưu hóa bằng cách thêm vào hệ thống cân bằng đối trọng, năng lượng tiêu thụ của robot đã giảm đáng kể, từ 10-20% tùy thuộc khối lượng robot.
TN (nguồn: TC KH GD Kỹ thuật - ĐH SP Kỹ thuật TP.HCM, số 30/2014)