Các nhà nghiên cứu tại Phòng thí nghiệm GRASP của Đại học Pennsylvania (Mỹ) gần đây đã phát triển khung nền (framework) cho phép kết hợp nhiều loại robot khác nhau giúp mô hình hóa quá trình biến đổi của môi trường theo thời gian. Nó cũng có thể dự đoán sự phát triển của các hiện tượng phức tạp, biến động và phi tuyến, như cháy rừng, sự phá hoại của côn trùng hoặc phát tán chất ô nhiễm. Đặc biệt, nó có khả năng hợp nhất nhiều loại dữ liệu thành một mô hình gắn kết, xác định nhanh các vị trí cảm biến tối ưu cho rô bốt di động và điều chỉnh mô hình trực tuyến cho các tình huống giám sát khác nhau.
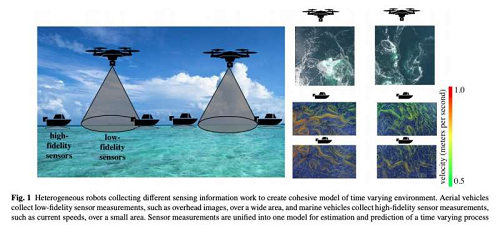
Nhóm nghiên cứu đã sử dụng 2 nhóm robot với các kiểu chuyển động và khả năng cảm biến khác nhau (ví dụ: robot trên không, trên mặt đất và trên biển). Trong đó, một loại robot thu thập các phép đo với độ trung thực cao ở thang thời gian chậm và một loại khác sẽ thu thập các phép đo với độ trung thực thấp ở thang thời gian nhanh, sau đó kết hợp các phép đo lại với nhau. Một số quá trình biến đổi môi trường có thể rất phức tạp và đa chiều, các nhóm robot này phải khám phá theo các hướng khác nhau và thu thập dữ liệu theo các phép đo riêng biệt.
Dữ liệu được thu thập bởi hai nhóm robot khác nhau giúp tạo ra một mô hình không gian phi tuyến, phức tạp. Mô hình này được sử dụng để xác định các vị trí tối ưu cho robot di chuyển và dự đoán các quá trình biến đổi của môi trường sẽ diễn ra hoặc phát triển như thế nào theo thời gian.
Theo nhóm nghiên cứu, khung nền mới này cho phép tách lớp dữ liệu theo biểu mẫu không gian và thời gian. Việc phân tách này được sử dụng để phân chia nhiệm vụ cho từng loại robot, tận dụng được thế mạnh riêng của từng loại robot để cùng hoàn thành nhiệm vụ.
Nhóm nghiên cứu đã tiến hành thử nghiệm và đánh giá khả năng phát triển của một đám mây plasma nhân tạo của hệ thống. Họ đã tạo ra một môi trường mô phỏng đám mây plasma trong vùng lân cận của Trái đất. Sau đó, các nhà nghiên cứu đưa bốn robot hàng hải và hai thiết bị bay vào môi trường mô phỏng để thu thập các phép đo và ước tính khác nhau liên quan đến sự phát triển của đám mây.
Các nhà nghiên cứu đã sử dụng khung nền của họ để tạo ra một mô hình kết hợp các phép đo. Dữ liệu của các phép đo này được thu thập bởi các robot hàng không và hàng hải trong môi trường mô phỏng. Sau đó, họ so sánh các dự đoán của mô hình này với những dự đoán dựa trên các phép đo được thu thập bởi chỉ một loại robot.
Kết quả cho thấy dữ liệu theo hướng tiếp cận mới tương đương với dữ liệu từ robot hàng hải. Dữ liệu từ thiết bị bay bị nhiễu và được thu thập ở độ phân giải không gian thấp hơn nhiều so với quy trình thực tế.
Ngoài ra, các nhà nghiên cứu đã đánh giá hiệu suất của khung nền mới bằng cách mô hình hóa mật độ của một đám mây plasma nhân tạo khác được chiếu bên trong một bể nước thực. Trong thử nghiệm này, họ thu thập các phép đo bằng cách sử dụng ba phương tiện tự hành mASV(micro-autonomous surface vehicles) bao gồm: một mASV mô phỏng và hai phương tiện bay mô phỏng.
Khi quy trình trở nên phức tạp thì việc kết hợp nhiều loại dữ liệu sẽ giúp cho phương pháp tiếp cận mới hoạt động tốt hơn.
Kết quả thử nghiệm cho thấy việc hợp nhất các phép đo được thu thập bởi các loại robot khác nhau để mô hình hóa các quá trình biến đổi của môi trường phức tạp sẽ cho kết quả tốt hơn so với việc chỉ sử dụng các phép đo do một loại robot duy nhất thu thập.
Trong tương lai, khung nền mới này có thể cho phép các nhà khoa học xây dựng các bản đồ hoặc mô hình thống nhất của các môi trường khác nhau, như sử dụng robot trên không và trên biển để lập bản đồ các yếu tố như nhiệt độ hoặc dòng chảy đại dương.
Báo cáo của nghiên cứu này đã được đăng trên trên arXiv.
Diệu Huyền (CESTI) - Theo Techxplore.com